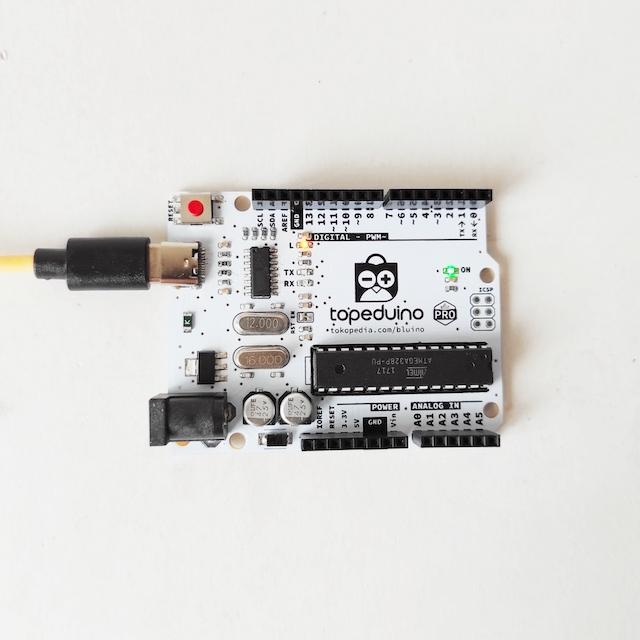
Halo agan-agan sekalian, tutorial kali ini bakal ngeliatin cara ngebuat "Topeduino" yaitu sebuah papan Arduino Uno Compatible, mulai dari order PCB stencil, cara nggunain timah cair, pasangin komponen SMD kecil secara manual pake tangan sama manasin pake hot air. Keistimewaan Topeduino dari Arduino uno biasanya adalah karena menggunakan soket USB tipe C jadi terlihat kekinian. Kali aja setelah liat ini agan-agan punya ide untuk bikin Arduino versi sendiri