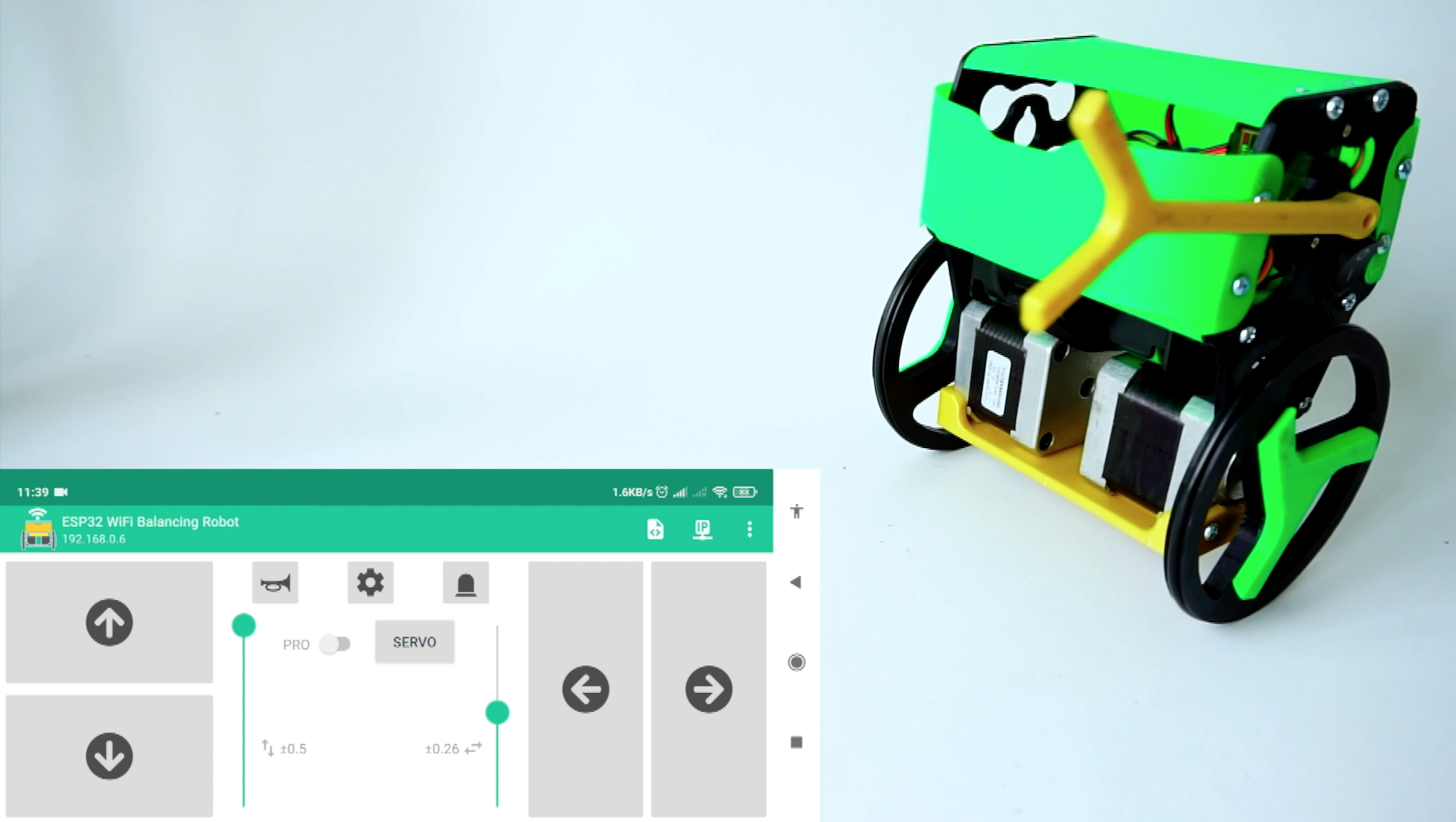
Halo agan-agan sekalian, apa tahu yang namanya Self balancing Robot, itu tuh robot mainan yang ada rodanya dua kiri kanan tapi anehnya robot ini bisa berdiri seimbang tanpa harus jatuh. Kenapa bisa seimbahnya dikarenakan pada rangkaian robot tersebut terdapat sensor accelerometer dan gyro yang bisa bikin motor bergerak maju mundur seimbang tanpa terjatuh.