
Halo agan semuanya, sekarang ane mau nunjukin kepada agan bagaimana membuat papan arduino uno sendiri yang dapat mengunggah kode/sketch melalui bluetooth HC-05, sistem minimum berbasis arduino ini bisa disebut "DIY Bluino One".






Halo agan semuanya, sekarang ane mau nunjukin kepada agan bagaimana membuat papan arduino uno sendiri yang dapat mengunggah kode/sketch melalui bluetooth HC-05, sistem minimum berbasis arduino ini bisa disebut "DIY Bluino One".
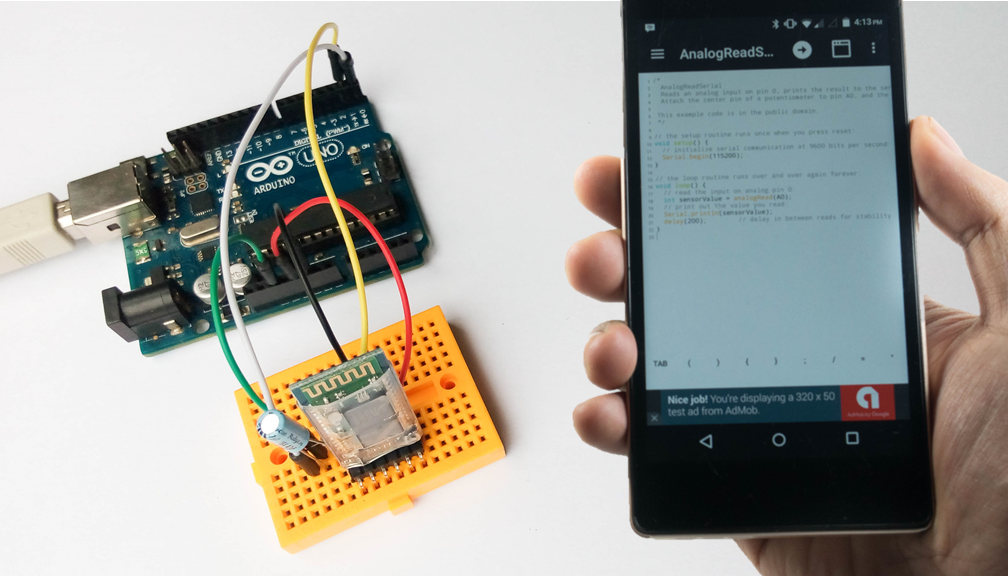
Hai agan-agan sekalian, dalam tutorial kali ini ane akan menunjukan bagaimana cara Arduino Uno kamu supaya bisa diprogram menggunakan HP Android tanpa kabel alias lewat bluetooth. Caranya sangat mudah sekali, mari kita mulai saja! :)









