

Halo agan agan sekalian, kalau pernah punya mobil-mobilan remote control alias RC sekarng mungkin sudah biasa, tapi kalau mobil RC nya ada kamera kayanya sedikit luar biasa. Apalagi kalau agan sendiri yang buatnya tambah luar biasa.
Ikutin tutorial ini nanti agan bakal ditunjukin alat-alat dan komponen apa saja yang diperlukan serta bagaimana cara membuatnya.
Jika agan ingin membuat PCB dan sedang mencari jasa cetak PCB, bisa langsung order saja ke PCBWAY.COM, harganya lebih murah $5 bisa mendapatkan papan PCB 10 keping dengan kualitas PCB yang sangat bagus.
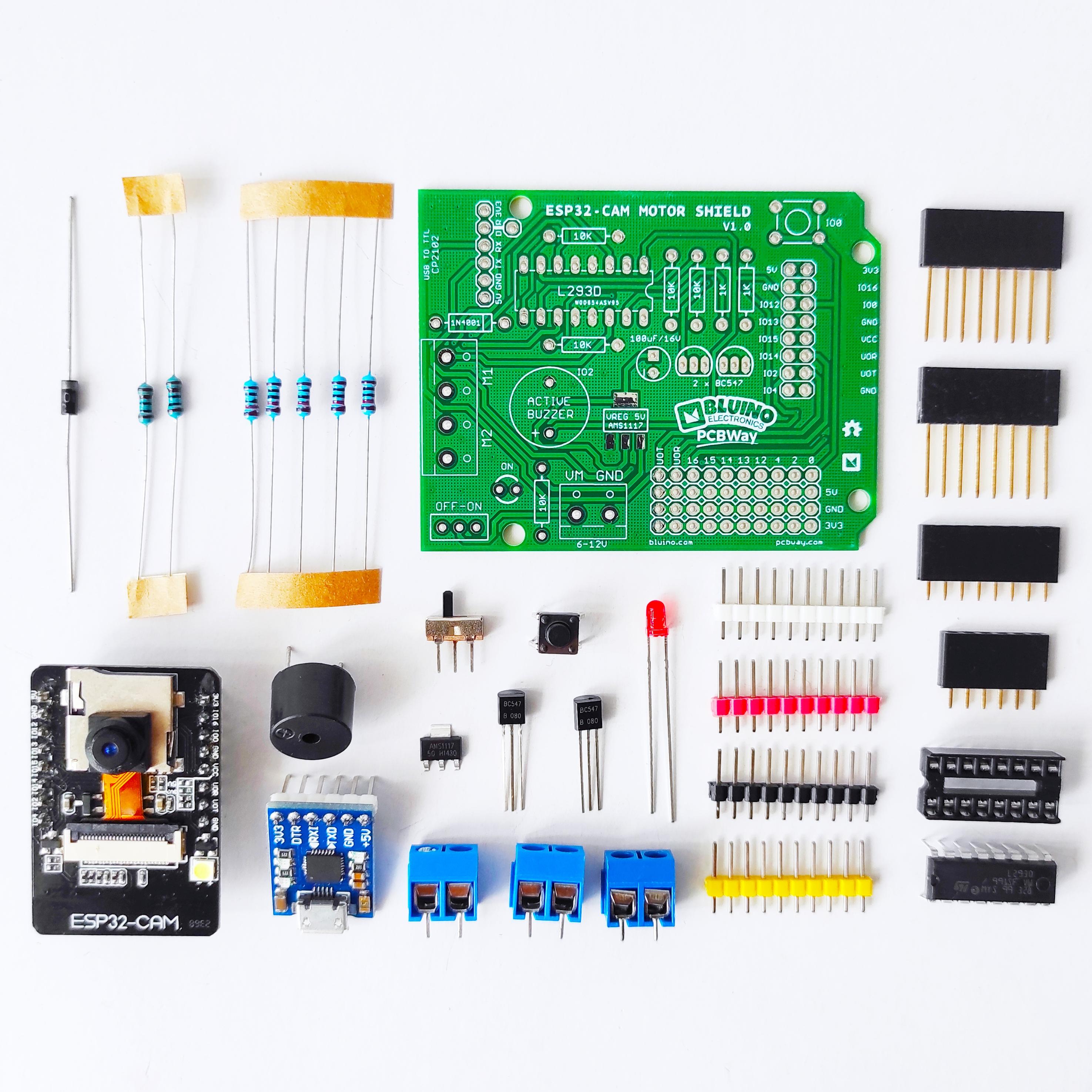
Daftar Komponen:
Order PCB (PCBWAY)
Untuk membuat proyek ini kamu perlu memesan prototipe PCB di PCBWAY. Cara pemesanannya sangat mudah, kamu akan mendapatkan 10 keping PCB seharga $5 dengan kualitas PCB yang sangat bagus.
Langkah-langkah order:
1. SignUp/Log in di pcbway.com
2. Buka tautan proyek PCB ini.
3. Klik Tambahkan ke troli.
4. Tunggu sebentar untuk review PCB, lalu Klik Check Out.

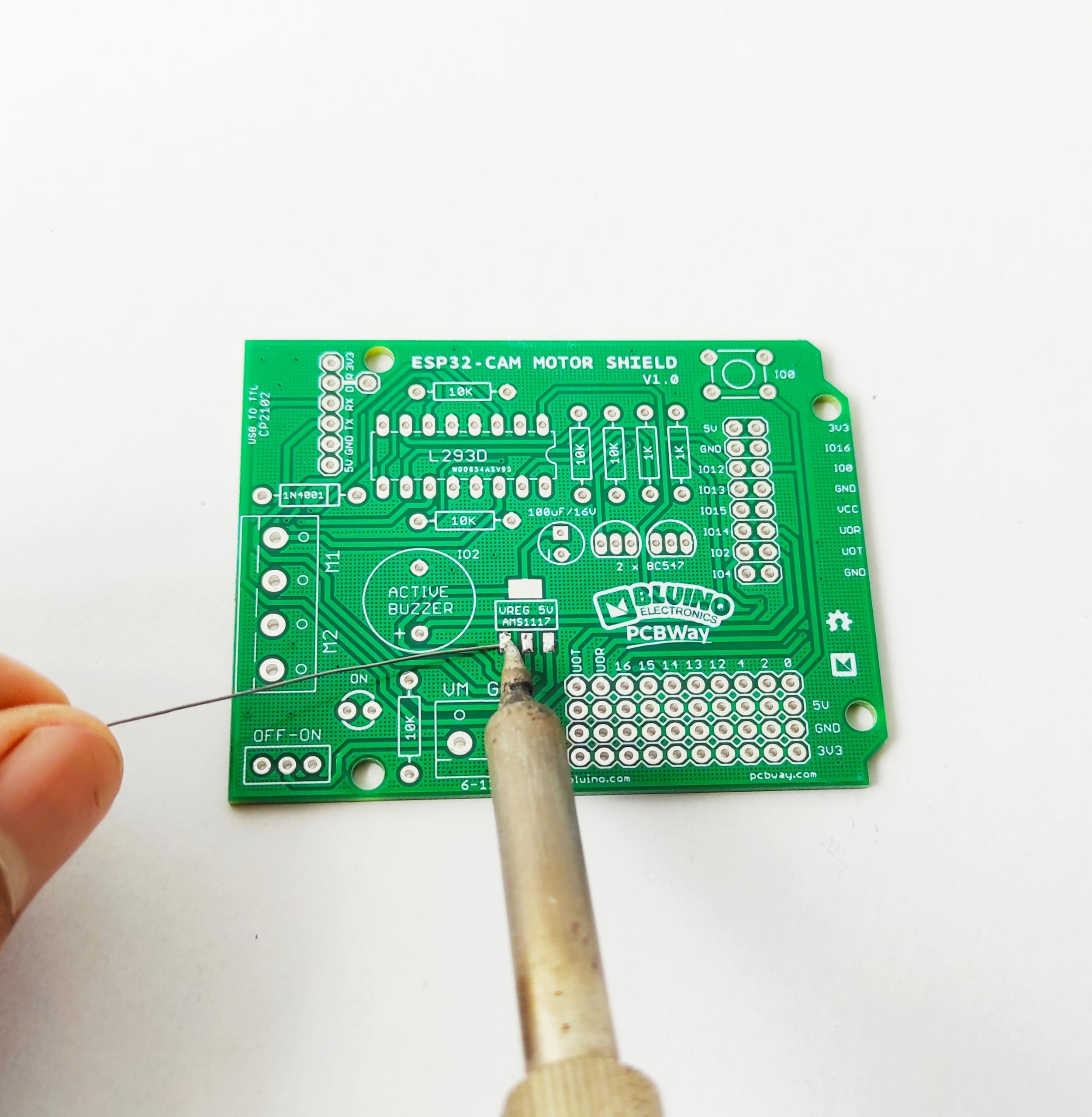
Menyolder Komponen SMD
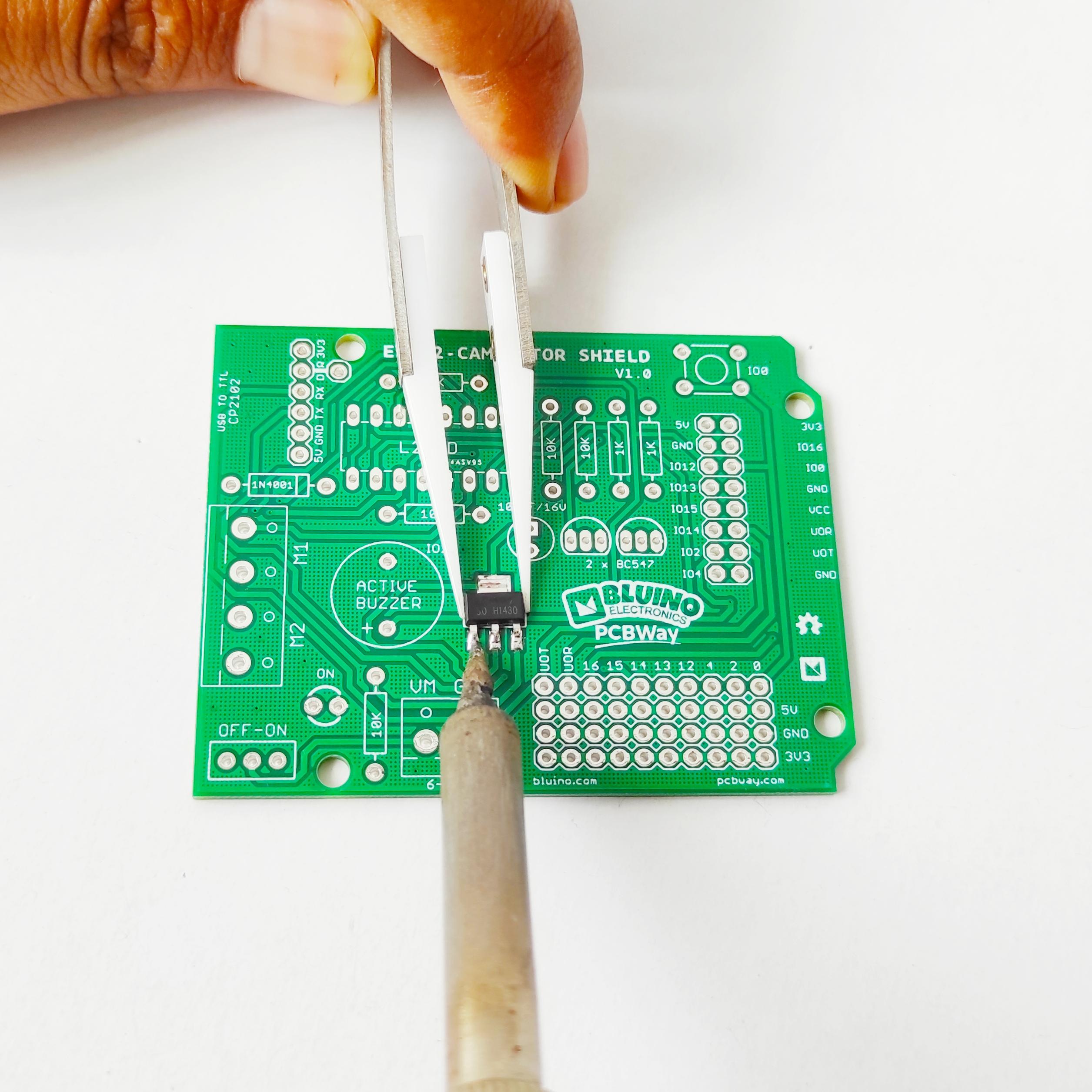
Proyek kali ini memiliki satu komponen SMD, jangan khawatir komponen ini tidak terlalu sulit untuk disolder karena ukurannya cukup besar, agan hanya membutuhkan pinset sebagai alat bantu untuk menahan komponen saat disolder. Langkah pertama beri lapisan timah pada tembaga PCB untuk tempat kaki komponen SMD.
Kemudian ditahan menggunakan pinset lalu di panaskan kembali timah hingga menempel dengan kaki komponen SMD.
Memasang Komponen
Pasang semua komponen pada PCB mengikuti gambar/simbol komponen yang ada pada bagian atas PCB, untuk lebih jelasnya dapat mengikuti step by step pada video youtube.

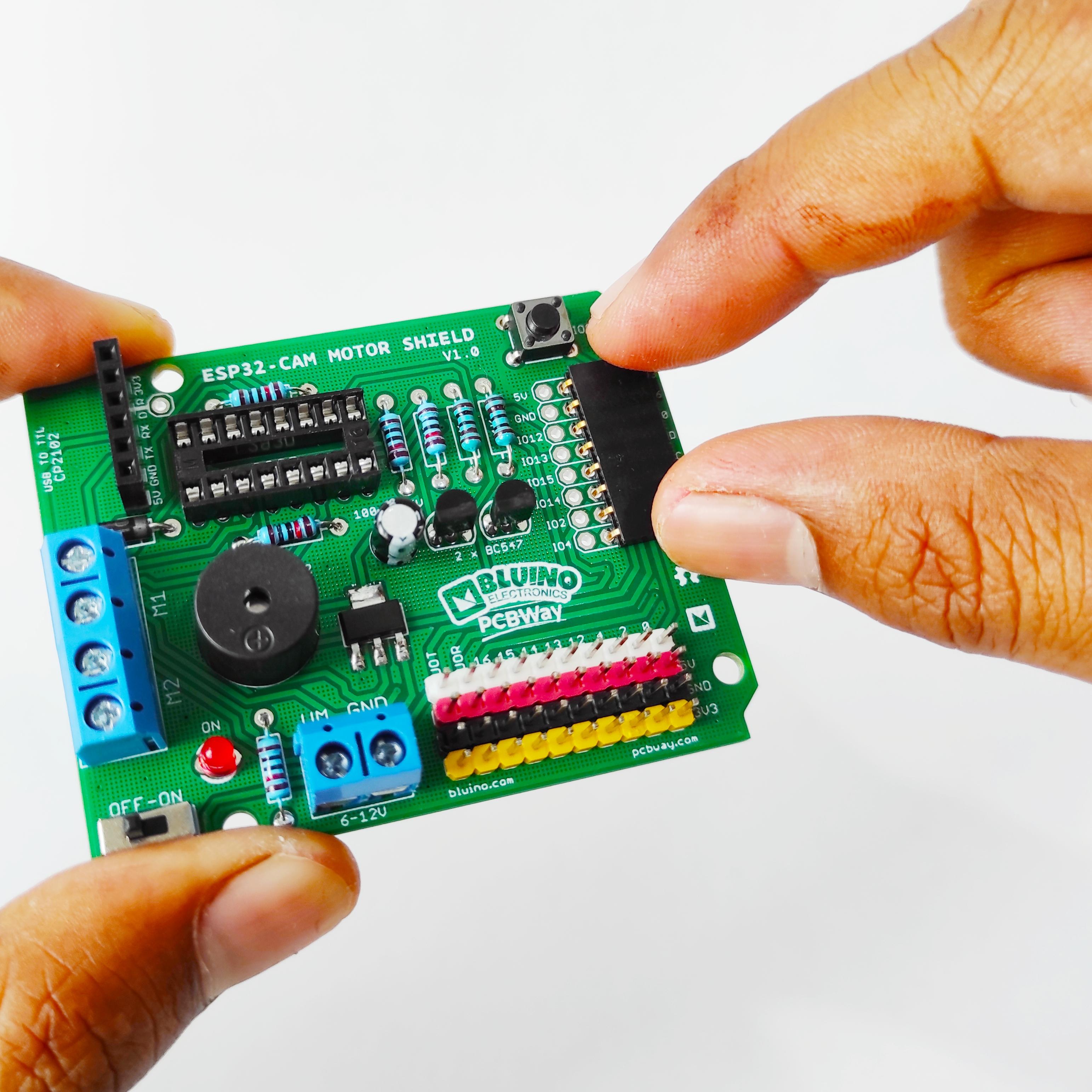
Menyolder Komponen
Solder semua kaki komponen pada bagian bawah PCB, untuk lebih jelasnya dapat mengikuti step by step pada video youtube.

Kemudian potong kaki komponen yang panjang menggunakan tang pemotong, hati-hati ketika memotong pastikan memakai kacamata safety.
Memasang Socket ESP32-Cam
Terdapat dua jenis female pin header 8 pin yang akan digunakan, yaitu dengan kaki yang pendek dan kaki yang panjang.
Untuk kaki yang pendek bengkokan semua kaki pin menggunakan tang hingga membentuk sudut 90 derajat.

Kemudian pasang pada PCB bagian depan seperti terlihat pada gambar.
Langkah selanjutnya solder pada bagian belakang PCB.

Jenis yang kedua female pin header 8 pin dengan kaki yang panjang, disini menggunakan sebanyak 2 buah.
Pertama bengkokan terlebih dahulu salah satu female pin header.

Setelah itu sambungkan dengan cara memasukan ke female pin header yang satunya lagi dan jangan terlalu dalam. Pastikan setiap pin tersambung dengan menggunakan multitester untuk mengetes continuity.
Setelah itu lem menggunakan power glue supaya tidak mudah terlepas.

Dengan bantuan ESP32-Cam board sebagai mal pasangkan pada PCB.

Langkah terakhir solder pada bagian belakang PCB.

Memasang IC, ESP32-Cam & USB to TTL Modul
Pasang IC L293D pada soket IC, lihat posisinya jangan terbalik. Kemudian pasang modul USB to TTL CP2102 yang sudah memiliki pin header.

Memasang ESP32-Cam Motor Shield ke Chassis
Agan bisa menggunakan chasis custom untuk mobil robot yang banyak dipasaran bisa didapat dari toko online yang biasa digunakan untuk membangun robot manggunakan Arduino Uno, karena ukuran PCB dan jarak lubang sama dengan Arduino Uno.
Untuk jumlah roda/motor penggerak tidak masalah jika agan menggunakan empat atau dua motor, sebenarnya output dari ESP32-Cam Motor Shield motor hanya dua yaitu kiri dan kanan, kalau ingin menggunakan empat roda/motor penggerak hanya dipasang secara paralel, berikut gambar rangkaiannya.

Hubungkan motor kiri dan motor kanan ke terminal sekrup pada output driver motor ESP32-Cam Motor Shield. Hubungkan baterai 2 x 18650 3.7V ke sekrup terminal catu daya pada ESP32-Cam Motor Shield.

Mengisi Program ke ESP32-Cam Board
Untuk membuat WiFi Kamera RC Car berfungsi dan dapat dikendalikan oleh smartphone Android, agan harus memprogram ESP32-Cam terlebih dahulu. Caranya cukup mudah hanya cukup menggunakan smartphone Android tidak memerlukan lagi Laptop/PC, ikuti langkah berikut:
- Install ESP32 Camera WiFi Robot Car dari Google Playstore.

- Hubungkan antara smartphone Android dengan ESP32-Cam Motor Shield menggunakan kabel USB dan USB OTG adapter. (pastikan HP agan support USB OTG)

- Untuk menjadikan ESP32-Cam board siap untuk diisi program, dalam kondisi menyala agan perlu menekan serta menahan tombol GPIO0 kemudian menekan tombol reset pada ESP32-Cam board. setelah itu lepas kan keduanya maka sekarang posisi chip ESP32 siap untuk diisi program melalui USB to TTL CP2102.

- Buka aplikasi ESP32 Camera Wifi Robot Car, pada menu bar atas tekan icon Circuit diagram & Code. Kemudian setelah terbuka tampilan gambar rangkaian dan kode pada menu bar atasnya tekan ikon tiga titik (menu lainnya), buka pilihan Motor Driver to be Used lalu pilih ESP32-Cam Motor Shield, kemudian buka pilihan Upload Firmware Via lalu pilih USB OTG, jika ingin menghubungkan Mobil RC ke sebuah router jaringan rumah agan bisa set SSID name & Password. Setelah selesai konfigurasi langkah selanjutnya tekan ikon UPLOAD, dan tunggu sampai proses uploadnya selesai. Terakhir tekan tombol reset untuk menjalankan program.

Selain mengisi program melalui smartphone Android, agan dapat juga memprogram ESP32-Cam melalui komputer menggunakan software Arduino IDE menggunakan kode program dibawah ini:
Catatan: Software Arduino IDE agan harus sudah disetting untuk dapat digunakan untuk memprogram ESP32 sebelumnya.
Simpan sketch di bawah dengan nama file "esp32cam_wifi_robot_car_l293d.ino"
#include "esp_camera.h"
#include <WiFi.h>
#include <ArduinoOTA.h>
/* Wifi Crdentials */
String sta_ssid = "$your_ssid_maximum_32_characters"; // set Wifi network you want to connect to
String sta_password = "$your_pswd_maximum_32_characters"; // set password for Wifi network
/* define CAMERA_MODEL_AI_THINKER */
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
/* Defining motor and servo pins */
extern int DRV_A = 12;
extern int DRV_B = 13;
extern int DIR_A = 14;
extern int DIR_B = 15;
extern int ledVal = 20; // setting bright of flash LED 0-255
extern int ledPin = 4; // set digital pin GPIO4 as LED pin (use biult-in LED)
extern int buzzerPin = 2; // set digital pin GPIO2 as LED pin (use Active Buzzer)
extern int servoPin = 2; // set digital pin GPIO2 as servo pin (use SG90)
unsigned long previousMillis = 0;
void startCameraServer();
void initServo() {
ledcSetup(8, 50, 16); /*50 hz PWM, 16-bit resolution and range from 3250 to 6500 */
ledcAttachPin(servoPin, 8);
}
void initLed() {
ledcSetup(7, 5000, 8); /* 5000 hz PWM, 8-bit resolution and range from 0 to 255 */
ledcAttachPin(ledPin, 7);
}
void setup() {
Serial.begin(115200); // set up seriamonitor at 115200 bps
Serial.setDebugOutput(true);
Serial.println();
Serial.println("*ESP32 Camera Remote Control - L293D Bluino Shield*");
Serial.println("--------------------------------------------------------");
// Set all the motor control pin to Output
pinMode(DRV_A, OUTPUT);
pinMode(DRV_B, OUTPUT);
pinMode(DIR_A, OUTPUT);
pinMode(DIR_B, OUTPUT);
pinMode(ledPin, OUTPUT); // set the LED pin as an Output
pinMode(buzzerPin, OUTPUT); // set the buzzer pin as an Output
pinMode(servoPin, OUTPUT); // set the servo pin as an Output
// Initial state - turn off motors, LED & buzzer
digitalWrite(DRV_A, LOW);
digitalWrite(DRV_B, LOW);
digitalWrite(DIR_A, LOW);
digitalWrite(DIR_B, LOW);
digitalWrite(ledPin, LOW);
digitalWrite(buzzerPin, LOW);
digitalWrite(servoPin, LOW);
/* Initializing Servo and LED */
initServo();
initLed();
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
//init with high specs to pre-allocate larger buffers
if(psramFound()){
config.frame_size = FRAMESIZE_UXGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
//drop down frame size for higher initial frame rate
sensor_t * s = esp_camera_sensor_get();
s->set_framesize(s, FRAMESIZE_QVGA);
// Set NodeMCU Wifi hostname based on chip mac address
char chip_id[15];
snprintf(chip_id, 15, "%04X", (uint16_t)(ESP.getEfuseMac()>>32));
String hostname = "esp32cam-" + String(chip_id);
Serial.println();
Serial.println("Hostname: "+hostname);
// first, set NodeMCU as STA mode to connect with a Wifi network
WiFi.mode(WIFI_STA);
WiFi.begin(sta_ssid.c_str(), sta_password.c_str());
Serial.println("");
Serial.print("Connecting to: ");
Serial.println(sta_ssid);
Serial.print("Password: ");
Serial.println(sta_password);
// try to connect with Wifi network about 10 seconds
unsigned long currentMillis = millis();
previousMillis = currentMillis;
while (WiFi.status() != WL_CONNECTED && currentMillis - previousMillis <= 10000) {
delay(500);
Serial.print(".");
currentMillis = millis();
}
// if failed to connect with Wifi network set NodeMCU as AP mode
IPAddress myIP;
if (WiFi.status() == WL_CONNECTED) {
Serial.println("");
Serial.println("*WiFi-STA-Mode*");
Serial.print("IP: ");
myIP=WiFi.localIP();
Serial.println(myIP);
delay(2000);
} else {
WiFi.mode(WIFI_AP);
WiFi.softAP(hostname.c_str());
myIP = WiFi.softAPIP();
Serial.println("");
Serial.println("WiFi failed connected to " + sta_ssid);
Serial.println("");
Serial.println("*WiFi-AP-Mode*");
Serial.print("AP IP address: ");
Serial.println(myIP);
delay(2000);
}
// Start camera server to get realtime view
startCameraServer();
Serial.print("Camera Ready! Use 'http://");
Serial.print(myIP);
Serial.println("' to connect ");
ArduinoOTA.begin(); // enable to receive update/upload firmware via Wifi OTA
}
void loop() {
// put your main code here, to run repeatedly:
ArduinoOTA.handle();
}
Simpan sketch di bawah dengan nama file "app_httpd.cpp"
#include "esp_http_server.h"
#include "esp_timer.h"
#include "esp_camera.h"
#include "img_converters.h"
#include "Arduino.h"
/* Initializing pins */
extern int DRV_A;
extern int DRV_B;
extern int DIR_A;
extern int DIR_B;
extern int ledPin;
extern int buzzerPin;
extern int servoPin;
extern int ledVal;
typedef struct {
httpd_req_t *req;
size_t len;
} jpg_chunking_t;
#define PART_BOUNDARY "123456789000000000000987654321"
static const char* _STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char* _STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char* _STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n";
httpd_handle_t stream_httpd = NULL;
httpd_handle_t camera_httpd = NULL;
static size_t jpg_encode_stream(void * arg, size_t index, const void* data, size_t len){
jpg_chunking_t *j = (jpg_chunking_t *)arg;
if(!index){
j->len = 0;
}
if(httpd_resp_send_chunk(j->req, (const char *)data, len) != ESP_OK){
return 0;
}
j->len += len;
return len;
}
static esp_err_t capture_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
int64_t fr_start = esp_timer_get_time();
fb = esp_camera_fb_get();
if (!fb) {
Serial.printf("Camera capture failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
httpd_resp_set_type(req, "image/jpeg");
httpd_resp_set_hdr(req, "Content-Disposition", "inline; filename=capture.jpg");
size_t fb_len = 0;
if(fb->format == PIXFORMAT_JPEG){
fb_len = fb->len;
res = httpd_resp_send(req, (const char *)fb->buf, fb->len);
} else {
jpg_chunking_t jchunk = {req, 0};
res = frame2jpg_cb(fb, 80, jpg_encode_stream, &jchunk)?ESP_OK:ESP_FAIL;
httpd_resp_send_chunk(req, NULL, 0);
fb_len = jchunk.len;
}
esp_camera_fb_return(fb);
int64_t fr_end = esp_timer_get_time();
Serial.printf("JPG: %uB %ums", (uint32_t)(fb_len), (uint32_t)((fr_end - fr_start)/1000));
return res;
}
static esp_err_t stream_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t _jpg_buf_len = 0;
uint8_t * _jpg_buf = NULL;
char * part_buf[64];
static int64_t last_frame = 0;
if(!last_frame) {
last_frame = esp_timer_get_time();
}
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if(res != ESP_OK){
return res;
}
while(true){
fb = esp_camera_fb_get();
if (!fb) {
Serial.printf("Camera capture failed");
res = ESP_FAIL;
} else {
if(fb->format != PIXFORMAT_JPEG){
bool jpeg_converted = frame2jpg(fb, 80, &_jpg_buf, &_jpg_buf_len);
esp_camera_fb_return(fb);
fb = NULL;
if(!jpeg_converted){
Serial.printf("JPEG compression failed");
res = ESP_FAIL;
}
} else {
_jpg_buf_len = fb->len;
_jpg_buf = fb->buf;
}
}
if(res == ESP_OK){
size_t hlen = snprintf((char *)part_buf, 64, _STREAM_PART, _jpg_buf_len);
res = httpd_resp_send_chunk(req, (const char *)part_buf, hlen);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, (const char *)_jpg_buf, _jpg_buf_len);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, _STREAM_BOUNDARY, strlen(_STREAM_BOUNDARY));
}
if(fb){
esp_camera_fb_return(fb);
fb = NULL;
_jpg_buf = NULL;
} else if(_jpg_buf){
free(_jpg_buf);
_jpg_buf = NULL;
}
if(res != ESP_OK){
break;
}
int64_t fr_end = esp_timer_get_time();
int64_t frame_time = fr_end - last_frame;
last_frame = fr_end;
frame_time /= 1000;
}
last_frame = 0;
return res;
}
static esp_err_t cmd_handler(httpd_req_t *req){
char* buf;
size_t buf_len;
char variable[32] = {0,};
char value[32] = {0,};
buf_len = httpd_req_get_url_query_len(req) + 1;
if (buf_len > 1) {
buf = (char*)malloc(buf_len);
Serial.println(buf);
if(!buf){
httpd_resp_send_500(req);
return ESP_FAIL;
}
if (httpd_req_get_url_query_str(req, buf, buf_len) == ESP_OK) {
if (httpd_query_key_value(buf, "var", variable, sizeof(variable)) == ESP_OK &&
httpd_query_key_value(buf, "val", value, sizeof(value)) == ESP_OK) {
} else {
free(buf);
Serial.println(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
} else {
free(buf);
Serial.println(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
Serial.println(buf);
free(buf);
} else {
httpd_resp_send_404(req);
Serial.println(ESP_FAIL);
return ESP_FAIL;
}
int val = atoi(value);
sensor_t * s = esp_camera_sensor_get();
int res = 0;
if(!strcmp(variable, "framesize")) {
if(s->pixformat == PIXFORMAT_JPEG) res = s->set_framesize(s, (framesize_t)val);
}
else if(!strcmp(variable, "quality")) res = s->set_quality(s, val);
else if(!strcmp(variable, "contrast")) res = s->set_contrast(s, val);
else if(!strcmp(variable, "brightness")) res = s->set_brightness(s, val);
else if(!strcmp(variable, "saturation")) res = s->set_saturation(s, val);
else if(!strcmp(variable, "gainceiling")) res = s->set_gainceiling(s, (gainceiling_t)val);
else if(!strcmp(variable, "colorbar")) res = s->set_colorbar(s, val);
else if(!strcmp(variable, "awb")) res = s->set_whitebal(s, val);
else if(!strcmp(variable, "agc")) res = s->set_gain_ctrl(s, val);
else if(!strcmp(variable, "aec")) res = s->set_exposure_ctrl(s, val);
else if(!strcmp(variable, "hmirror")) res = s->set_hmirror(s, val);
else if(!strcmp(variable, "vflip")) res = s->set_vflip(s, val);
else if(!strcmp(variable, "awb_gain")) res = s->set_awb_gain(s, val);
else if(!strcmp(variable, "agc_gain")) res = s->set_agc_gain(s, val);
else if(!strcmp(variable, "aec_value")) res = s->set_aec_value(s, val);
else if(!strcmp(variable, "aec2")) res = s->set_aec2(s, val);
else if(!strcmp(variable, "dcw")) res = s->set_dcw(s, val);
else if(!strcmp(variable, "bpc")) res = s->set_bpc(s, val);
else if(!strcmp(variable, "wpc")) res = s->set_wpc(s, val);
else if(!strcmp(variable, "raw_gma")) res = s->set_raw_gma(s, val);
else if(!strcmp(variable, "lenc")) res = s->set_lenc(s, val);
else if(!strcmp(variable, "special_effect")) res = s->set_special_effect(s, val);
else if(!strcmp(variable, "wb_mode")) res = s->set_wb_mode(s, val);
else if(!strcmp(variable, "ae_level")) res = s->set_ae_level(s, val);
else {
res = -1;
}
if(res){
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
static esp_err_t status_handler(httpd_req_t *req){
static char json_response[1024];
sensor_t * s = esp_camera_sensor_get();
char * p = json_response;
*p++ = '{';
p+=sprintf(p, "\"framesize\":%u,", s->status.framesize);
p+=sprintf(p, "\"quality\":%u,", s->status.quality);
p+=sprintf(p, "\"brightness\":%d,", s->status.brightness);
p+=sprintf(p, "\"contrast\":%d,", s->status.contrast);
p+=sprintf(p, "\"saturation\":%d,", s->status.saturation);
p+=sprintf(p, "\"special_effect\":%u,", s->status.special_effect);
p+=sprintf(p, "\"wb_mode\":%u,", s->status.wb_mode);
p+=sprintf(p, "\"awb\":%u,", s->status.awb);
p+=sprintf(p, "\"awb_gain\":%u,", s->status.awb_gain);
p+=sprintf(p, "\"aec\":%u,", s->status.aec);
p+=sprintf(p, "\"aec2\":%u,", s->status.aec2);
p+=sprintf(p, "\"ae_level\":%d,", s->status.ae_level);
p+=sprintf(p, "\"aec_value\":%u,", s->status.aec_value);
p+=sprintf(p, "\"agc\":%u,", s->status.agc);
p+=sprintf(p, "\"agc_gain\":%u,", s->status.agc_gain);
p+=sprintf(p, "\"gainceiling\":%u,", s->status.gainceiling);
p+=sprintf(p, "\"bpc\":%u,", s->status.bpc);
p+=sprintf(p, "\"wpc\":%u,", s->status.wpc);
p+=sprintf(p, "\"raw_gma\":%u,", s->status.raw_gma);
p+=sprintf(p, "\"lenc\":%u,", s->status.lenc);
p+=sprintf(p, "\"hmirror\":%u,", s->status.hmirror);
p+=sprintf(p, "\"dcw\":%u,", s->status.dcw);
p+=sprintf(p, "\"colorbar\":%u", s->status.colorbar);
*p++ = '}';
*p++ = 0;
httpd_resp_set_type(req, "application/json");
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, json_response, strlen(json_response));
}
static esp_err_t state_handler(httpd_req_t *req){
char* buf;
size_t buf_len;
char cmd[32] = {0,};
buf_len = httpd_req_get_url_query_len(req) + 1;
if (buf_len > 1) {
buf = (char*)malloc(buf_len);
Serial.println(buf);
if(!buf){
httpd_resp_send_500(req);
return ESP_FAIL;
}
if (httpd_req_get_url_query_str(req, buf, buf_len) == ESP_OK) {
if (httpd_query_key_value(buf, "cmd", cmd, sizeof(cmd)) == ESP_OK) {
} else {
free(buf);
Serial.print("*");
Serial.println(ESP_FAIL);
httpd_resp_send_404(req);
return ESP_FAIL;
}
} else {
free(buf);
Serial.print("**");
Serial.println(ESP_FAIL);
httpd_resp_send_404(req);
return ESP_FAIL;
}
free(buf);
} else {
Serial.print("***");
Serial.println(ESP_FAIL);
httpd_resp_send_404(req);
return ESP_FAIL;
}
int res = 0;
if(!strcmp(cmd, "F")) {
Serial.println("Forward");
digitalWrite(DRV_A, HIGH);
digitalWrite(DRV_B, HIGH);
digitalWrite(DIR_A, HIGH);
digitalWrite(DIR_B, HIGH);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "B")) {
Serial.println("Backward");
digitalWrite(DRV_A, HIGH);
digitalWrite(DRV_B, HIGH);
digitalWrite(DIR_A, LOW);
digitalWrite(DIR_B, LOW);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "R")) {
Serial.println("Turn Right");
digitalWrite(DRV_A, HIGH);
digitalWrite(DRV_B, HIGH);
digitalWrite(DIR_A, LOW);
digitalWrite(DIR_B, HIGH);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "L")) {
Serial.println("Turn Left");
digitalWrite(DRV_A, HIGH);
digitalWrite(DRV_B, HIGH);
digitalWrite(DIR_A, HIGH);
digitalWrite(DIR_B, LOW);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "G")) {
Serial.println("Forward Left");
digitalWrite(DRV_A, HIGH);
digitalWrite(DRV_B, LOW);
digitalWrite(DIR_A, HIGH);
digitalWrite(DIR_B, HIGH);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "H")) {
Serial.println("Backward Left");
digitalWrite(DRV_A, HIGH);
digitalWrite(DRV_B, LOW);
digitalWrite(DIR_A, LOW);
digitalWrite(DIR_B, LOW);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "I")) {
Serial.println("Forward Right");
digitalWrite(DRV_A, LOW);
digitalWrite(DRV_B, HIGH);
digitalWrite(DIR_A, HIGH);
digitalWrite(DIR_B, HIGH);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "J")) {
Serial.println("Backward Right");
digitalWrite(DRV_A, LOW);
digitalWrite(DRV_B, HIGH);
digitalWrite(DIR_A, LOW);
digitalWrite(DIR_B, LOW);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "S")) {
Serial.println("Stop");
digitalWrite(DRV_A, LOW);
digitalWrite(DRV_B, LOW);
digitalWrite(DIR_A, LOW);
digitalWrite(DIR_B, LOW);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "V")) {
Serial.println("Horn On");
digitalWrite(buzzerPin, HIGH);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "v")) {
Serial.println("Horn Off");
digitalWrite(buzzerPin, LOW);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "W")) {
Serial.println("LED On");
ledcWrite(7, ledVal);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if(!strcmp(cmd, "w")) {
Serial.println("LED Off");
ledcWrite(7, 0);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "x")){
Serial.println("Flash Light : Low (20)");
ledVal = 20;
ledcWrite(7, ledVal);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "y")){
Serial.println("Flash Light : Medium (50)");
ledVal = 50;
ledcWrite(7, ledVal);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "z")){
Serial.println("Flash Light : Bright (100)");
ledVal = 100;
ledcWrite(7, ledVal);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "Z")){
Serial.println("Flash Light : Super Bright (255)");
ledVal = 255;
ledcWrite(7, ledVal);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
/* Controlling the servo motor angle with PWM */
/* ledcWrite(Channel, Dutycycle) dutycycle range : 3250-6500*/
else if (!strcmp(cmd, "0")){
Serial.println("Servo 0 (3250)");
ledcWrite(8, 3250);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "1")){
Serial.println("Servo 1 (3575)");
ledcWrite(8, 3575);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "2")){
Serial.println("Servo 2 (3900)");
ledcWrite(8, 3900);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "3")){
Serial.println("Servo 3 (4225)");
ledcWrite(8, 4225);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "4")){
Serial.println("Servo 4 (4550)");
ledcWrite(8, 4550);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "5")){
Serial.println("Servo 5 (4875)");
ledcWrite(8, 4875);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "6")){
Serial.println("Servo 6 (5200)");
ledcWrite(8, 5200);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "7")){
Serial.println("Servo 7 (5525)");
ledcWrite(8, 5525);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "8")){
Serial.println("Servo 8 (5850)");
ledcWrite(8, 5850);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "9")){
Serial.println("Servo 9 (6175)");
ledcWrite(8, 6175);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else if (!strcmp(cmd, "q")){
Serial.println("Servo q (6500)");
ledcWrite(8, 6500);
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, "OK", 2);
}
else {
res = -1;
}
if(res){
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
void startCameraServer(){
httpd_config_t config = HTTPD_DEFAULT_CONFIG();
httpd_uri_t status_uri = {
.uri = "/status",
.method = HTTP_GET,
.handler = status_handler,
.user_ctx = NULL
};
httpd_uri_t cmd_uri = {
.uri = "/control",
.method = HTTP_GET,
.handler = cmd_handler,
.user_ctx = NULL
};
httpd_uri_t capture_uri = {
.uri = "/capture",
.method = HTTP_GET,
.handler = capture_handler,
.user_ctx = NULL
};
httpd_uri_t stream_uri = {
.uri = "/stream",
.method = HTTP_GET,
.handler = stream_handler,
.user_ctx = NULL
};
httpd_uri_t state_uri = {
.uri = "/state",
.method = HTTP_GET,
.handler = state_handler,
.user_ctx = NULL
};
Serial.printf("Starting web server on port: '%d'", config.server_port);
if (httpd_start(&camera_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(camera_httpd, &cmd_uri);
httpd_register_uri_handler(camera_httpd, &capture_uri);
httpd_register_uri_handler(camera_httpd, &status_uri);
httpd_register_uri_handler(camera_httpd, &state_uri);
}
config.server_port += 1;
config.ctrl_port += 1;
Serial.printf("Starting stream server on port: '%d'", config.server_port);
if (httpd_start(&stream_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(stream_httpd, &stream_uri);
}
}
Mainkan Mobil RC Wifi Camera
Mobil RC Wifi Camera dapat dikontrol melalui smartphone Android dengan dua cara, dikontrol langsung antara smartphone Android ke ESP32-Cam (mode AP), dengan cara hubungkan smartphone Android ke SSID Wifi dari ESP32-Cam kemudian atur alamat IP pada aplikasi menjadi 192.168.4.1.
Cara kedua adalah ESP32-Cam (mode STA), dimana smartphone Android terhubung ke jaringan Wifi router yang sama kemudian atur alamat IP pada aplikasi sesuai dengan alamat IP yang dimiliki oleh ESP32-Cam (contoh:192.168.0.2).









Tidak ada komentar:
Posting Komentar